
April 1, 2008
By George Laird
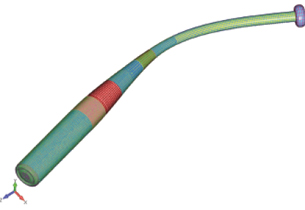 Figure 1: First vibration mode shape for an NCAA aluminum baseball bat is shown here. |
Analysis work is rarely done because we have spare time or are just curious about the mechanical behavior of a part or system. It’s typically performed because we are worried that the design might fail in a costly or dangerous manner. Depending on the potential failure mode our anxiety might not be too high, but given today’s demanding OEMs and litigious public, the task could involve high drama with your name written all over it.
If you’ve done analysis, you’re comfortable with the concepts involved in static stress analysis; you define the loading and boundary conditions, and identify success with a model bathed in soothing tones of gray and blue with nary a red region to be seen. However, in the back of your mind you might wonder about that large vibrating motor or the plant machinery that hums at a constant 12.5Hz. Alternatively, maybe you have an electronics enclosure that is to be mounted on the side of a building in an earthquake-prone region and your boss is questioning your bracket design. Whatever the case, you have the static world under control. What about the rest?
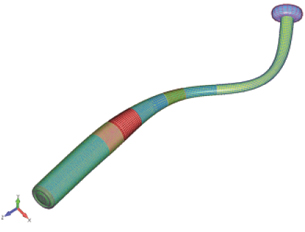 Figure 2: Second vibration mode shape is shown here for an NCAA aluminum baseball bat. |
In this series of articles, we’ll briefly review dynamic analysis fundamentals and see how they can easily be applied to make sure your design remains strong and rock solid in the face of dynamic events, whether simple vibrations, earthquakes, or even rocket launches.
Keeping it Simple
Static stress analysis is the proverbial “walk-in-the-park” for most people doing analysis work. It feels straightforward: we apply a fixed load and examine the resulting static behavior (generally linear, given linear material behavior). We get back some nice clean stresses and deflections that hopefully match our intuition for how our design should behave. While there might be a few hiccups along the way, the end result usually appears logical to our mechanical minds.
The dynamic behavior of a structure can also be viewed in the same light if we just shift our perspective a bit and think in terms of how our structure should naturally deform during a dynamic event. Whenever a structure is hit or given some sort of time-varying load (transient or steady-state), it will respond to this load with a very characteristic behavior. If the load is not incredibly massive and the structure doesn’t blow up or plastically deform as a result, then the dynamic response of your structure will most likely be linear. That is to say, if the load is removed and the structure is given a chance to calm down, then it will return to its un-deformed state. This is the same concept to use in linear static stress analysis: when the load is removed the stress in the structure goes back to zero.
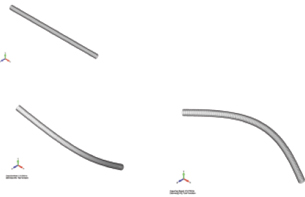 Figure 3: Undisturbed simple beam,plus two of the first vibration mode shapes (two directions of motion). |
What exactly do we mean by characteristic dynamic behavior? All structures have natural or characteristic modes of vibration. The sound or note from a guitar string is all about its natural frequency of vibration. When a guitar string is plucked it will vibrate at a certain note or tone. This note is at the string’s characteristic frequency.
Another example is aluminum baseball bats. The best aluminum baseball bats are designed with characteristic vibrations that attempt to limit the sting that occurs when you hit a ball outside the sweet spot on the bat. Each frequency creates a physical deformation or shape, and the total dynamic response of the bat is a combination of all its characteristic mode shapes (see Figures 1 and 2).
In finite element analysis (FEA), these natural frequencies are called eigenvalues and their shapes are noted as eigenvectors or eigenmodes. This nomenclature is rooted in German and the word eigen denotes “characteristic” or “peculiar to” and came into common use with mid-19th century mathematicians. With dynamic analyses, you’ll also see the terms normal modes and normal modes analysis. The use of the word normal prior to mode is just another way to say natural, characteristic, or eigen. When describing mode shapes, our preference is to just say normal modes since they represent the inherent natural response of the structure.
A Beam as One Example
If we picture a simply supported beam (fixed at one end), its natural mode shapes are determined by its geometry while its frequency of motion is fixed by its stiffness and density. Got all of that? Take a look at the graphic of our beam for its first three modes (see Figures 3 and 4). The first three modes of the beam are well-defined but come in pairs to cover all permissible ranges of motion for that beam. In 3D, the first mode can oscillate within a 360-degree envelope around its longitudinal axis. Numerically, the eigen solution process just gives us the two orthogonal modes, but it implies the full 360-degree envelope.
All structures have a nearly infinite number of permissible shapes or eigenvalues/eigenmodes. Fortunately, only the lower frequencies dominate the response of the structure so we can typically ignore the higher frequencies. A rule of thumb is that the first three modes capture the majority of the response of the structure and therefore one can safely ignore the higher frequencies. (The reasoning for this statement will be given in Part II of this series).
The frequency of these modes or their eigenvalues is dependent upon the stiffness and the density of the beam. The frequency equation for structures can thus be written as:
![]()
where K is the stiffness of the structure and m is the mass. This wonderfully simple equation represents a great deal of information about the system. The classic way to graphically describe this equation is with a mass suspended by a spring, where the mass block can only move up and down or has one degree of freedom (DOF) in FEA parlance. The eigenmode of this system is up and down.
Paper Mill Design Example
In commercially interesting structures, the same equation holds. The eigenvalue of the structure is still determined by
![]()
For example, consider a forming board used within a paper mill. The structure is 10 meters long and made of stainless steel. The paper mill has an operating frequency of around 9Hz. If the structure’s natural frequency is near this operating frequency, it will quickly resonate and tear itself apart. More importantly, it will also take the multi-million dollar paper mill along with it (see Figures 5 and 6).
The parameters of the original design placed the first mode at 8.4Hz, which would have been a disaster. The forming board is manufactured from 9.5mm-thick stainless-steel plates, so our first design inclination was to simply increase the thickness of the plates. We pursued this approach for several days but as we increased the thickness, the mass of the structure also increased almost in lockstep with the stiffness (see above equation). At the end of all this head banging, we got a marginal improvement
Subscribe to our FREE magazine, FREE email newsletters or both!
About the Author
DE’s editors contribute news and new product announcements to Digital Engineering.
Press releases may be sent to them via [email protected].


